Üniversitemizden 6 Eksenli Bluetooth Kontrollü Endüstriyel Robot Projesi
Ülkemizin ürettiği bilimsel ve teknolojik değerlere katkı sağlamak amacıyla Üniversitemiz tarafından yürütülen çalışmalara bir yenisi daha eklendi. Üniversitemiz, endüstride sıklıkla kullanılan, üretimdeki verimi ve hızı artıran robotlarla ilgili projelerini aralıksız sürdürüyor.
Üniversitemiz Teknoloji Fakültesi Mekatronik Mühendisliği Bölümü öğrencileri Bitirme Projesi dersi kapsamında 6 eksenli bir robot kol yaptılar.
Arş. Gör. Onur Örnek tarafından yürütülen 6 Eksenli Bluetooth Kontrollü Endüstriyel Robot Projesi’nde 14 öğrenci görev aldı. Bir yarıyılda gerçekleştirilen proje yaklaşık 3 bin 800 TL’ye mal edildi.
Öğrencilerimizin Yarısından Fazlası İstihdam Ediliyor
Konu ile ilgili açıklamaya yapan Arş. Gör. Onur Örnek, “Öğrencilerin hem böyle bir projeyi yapabiliyor olmaları hem de mesleki yaşamlarında kendilerine tecrübe katmaları açısından önemli. Teknoloji Fakültesi’nin eğitim-öğretim faaliyetinin önemli bir kısmını oluşturan uygulamalı eğitimler kapsamında bir dönem İş Yeri Eğitimi uygulamasına giden öğrenciler, fakültede aldıkları teorik ve uygulamalı eğitimin üzerine sanayi tecrübesini de katarak mesleki gelişimleri, kendilerine istihdam sağlayacak bir noktaya getirmektedirler. Her yıl, Teknoloji Fakültesinden mezun olan öğrencilerin yarısından fazlası, İş Yeri Eğitimi yaptıkları firmalarda istihdam edilmektedirler. Bu durum uygulamalı eğitimin öğrencilere sağladığı çok önemli avantaj olarak öne çıkmaktadır.” dedi.
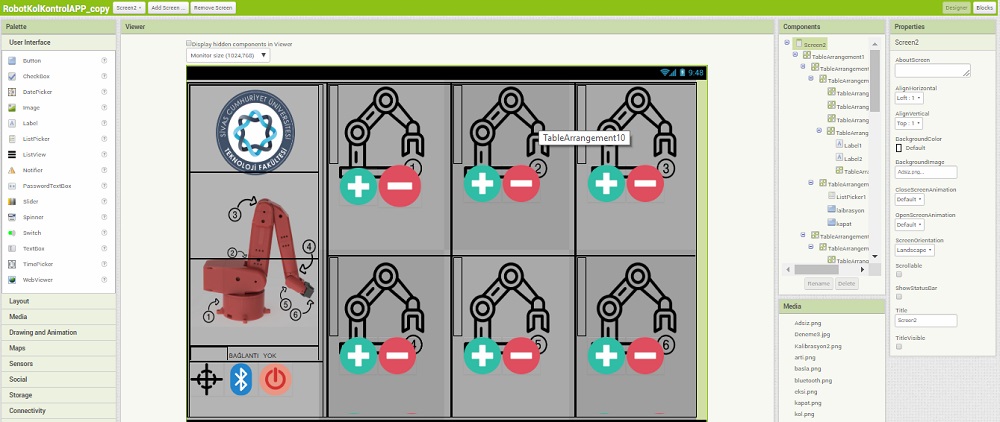
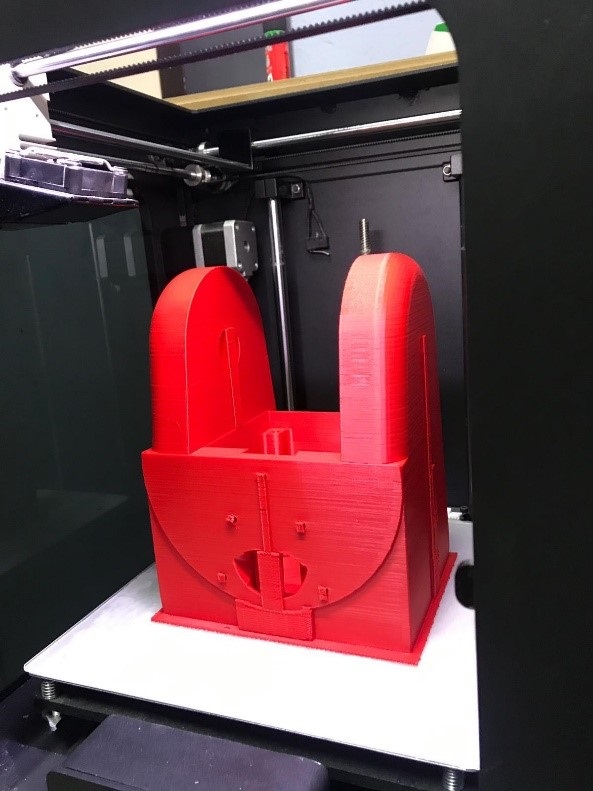
Çalışma ile ilgili de bilgi veren Arş. Gör. Örnek, Mekatronik Mühendisliği öğrencilerinin 6 eksenli endüstriyel robot tasarladıklarını, 3 boyutlu yazıcı ile baskısını aldıklarını ve yine kendi yazdıkları mobil uygulama ile android tablet kullanarak bluetooth ile kontrol ettiklerini anlattı.
Proje tasarım, imalat ve yazılım olarak üç ana bölüme ayrıldığını söyleyen Arş. Gör. Örnek, “Her konuyla ilgili bireysel araştırma ve çalışma konuları belirlendi. Tasarım aşamasında öncelikle robotun serbestlik derecesi, çalışma uzayı ve istenen boyutları belirlenerek SolidWorks programı ile 3 boyutlu çizimi yapıldı. Belirlenen ölçüdeki robotun istenilen yükü taşıyabilmesi için gerekli mukavemet ve moment hesapları yapılarak robotta kullanılması gereken motorlar ve bu motorları kullanmak için gerekli motor sürücüleri seçildi.” diye konuştu.
Arş. Gör. Örnek, üretimi tamamlanan robotun kontrolü için arduino mega üzerinde gerekli program yazıldıktan sonra MIT AppInventor kullanılarak robotun bluetooth yardımıyla android bir tablet ile kontrolünü sağlayacak mobil uygulamanın yazılımı ve arayüzü programlandığının altını çizdi.
“İmalat aşamasında, robotun çizimleri, kullanılacak motorlar, rulman ve cıvatalar belirlendikten sonra imalat işlemine geçildi.” diyen Arş. Gör. Örnek sözlerini şöyle bitirdi:
“SolidWorks programında çizimleri elde edilen parçalar 3-boyutlu yazıcı ile basıldı. Tasarım aşamasında seçilen motor, rulman, civatalar ise internet üzerinden sipariş edildi. Parçaların baskısı elde edildikten sonra montaj işlemi gerçekleştirildi.”